milestone
My Journey
My experiences on the road of exploration
milestone
My experiences on the road of exploration
2020
Aviation Science and Technology Innovation Base
After a half-year evaluation, I was selected to join NWPU AMT, where I worked with the team to bring our self-developed unmanned aerial vehicles into flight.

2021
YOLO, STM32, Qt
Participated in a national-level disciplinary competition for the first time and achieved 4th place among 88 finalist teams in the national finals, receiving the National First Prize.

2022
Student Union Officer
Organized academic and practice-oriented activities as a Student Union officer, gaining valuable experience in coordination and team management during a meaningful and rewarding period.
2023
Intelligent Robotics Research Center, NWPU
Special thanks to Prof. Ma for introducing me to Robot & 3D research and for his strong support at the beginning of my research.

2024
Guangzhou Xiangrui Technology Innovation Co., Ltd.
Building on my prior hands-on experience with UAVs and robotics at university, I once attempted to co-found a startup with classmates, although it ultimately did not succeed.

2025
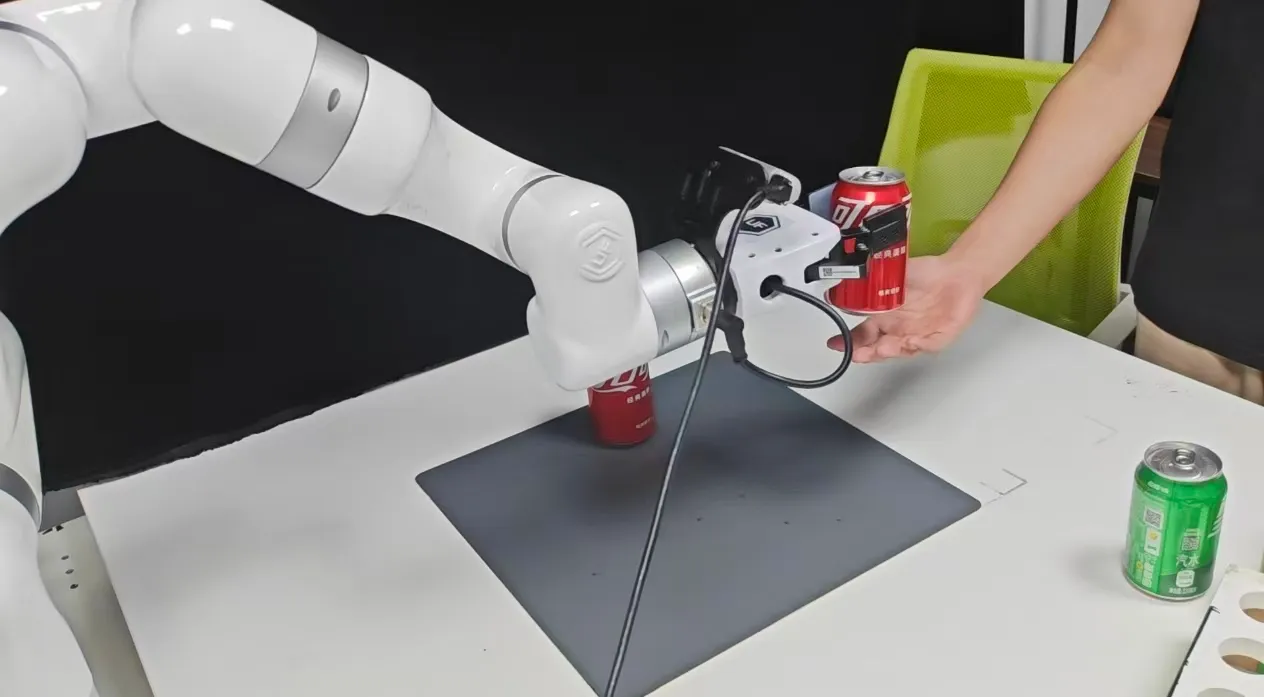
Embodied AI Research
After giving up my guaranteed admission to a graduate program in Astronautics, I am currently working as a Research Assistant at SJTU MINT Lab on Embodied Intelligence (VLA).